隨著社會經濟的發展,大型客流,如超市,機場,車站,會展中心和物流倉庫的規模不斷擴大,數量不斷增加,大中型城市的高水平、高檔次商業優勢不斷增強,安全自動化的需求越來越迫切。巡邏機器人是一個多功能集成系統,它可以感知環境,進行規劃路線,做出動態決策,進行行為控制并伴隨報警裝置。為了保證場所的安全,可以利用機器人對場所進行定點監視或不間斷地巡邏監視。目前,巡邏機器人在安全工作中發揮的作用越來越重要,對它的研究也越來越受到國內外的關注。它已成為服務機器人的一個新的研究方向。警用巡邏機器人的應用和發展日新月異,各類警警用巡邏機器人廣泛應用于安全,消防,拆除,偵察,反恐等領域,對維護國家公共安全具有重要意義。

1 激光雷達簡介
激光雷達是感受外界環境的傳感器,傳感器指的是可以根據某些規律變換待測量信息然后輸出的檢測裝置。它是感受外部環境的重要硬件。它主要分為視覺,位置感,速度感,力感,觸覺感,例如高速攝像頭等[1]。視覺輸入系統,如攝像頭和3D激光雷達,激光掃描儀等環境視覺輸入系統。在智能設備中,傳感器相當于諸如無人駕駛汽車或機器人等設備的感覺器官,作為除手動設置參數之外的唯一自主輸入。它決定了設備與外部環境之間的交互能力以及設備信息輸入的準確性和豐富性。
激光雷達是一種基于非接觸式激光測距技術的傳感器。它可以通過發射激光束來檢測目標,從而獲得準確的三維圖像。它可以實時獲得局部環境的高精度輪廓信息,測距精度可達到厘米級,具有精度高,速度快,效率高的優點,是導航,測繪等領域不可或缺的一部分。
表1 各種激光雷達功能及應用場景

激光雷達主要分為一維激光雷達、二維激光雷達和三維激光雷達,不同的激光雷達所應用的環境有所不同(見表1)。
目前,隨著人工智能的迅猛發展,三維激光雷達的優勢越來越突出,應用范圍越來越廣泛。
2、3D激光雷達工作原理
激光雷達通過發射反射周圍物體并返回傳感器的激光脈沖來確定其周圍的幾何位置。它會計算脈沖到達物體、反射和返回到傳感器所需的時間,并利用這段時間來計算物體所處的距離。掃描器通過旋轉發射器 ( 或一組發射器 ) 來構建一個完整的點云,這樣脈沖就會向多個方向發送。不同的激光雷達掃描器在許多方面各有不同,從它們的精度、它們可以掃描的面積或體積、收集了多少信息,以及在此基礎上,它們必須如何安裝才能對特定的應用程序有用。另一個考慮因素是有哪些軟件工具可以與硬件接口和收集數據,以便以一種有用的方式呈現或處理數據。
3D激光導航的核心部件包括 3D 激光雷達,陀螺儀和編碼器,其核心技術主要是地圖等比構造和激光數據實時匹配定位。它首先進行信息融合從而求解位置,然后通過激光測距計算機器人的全局位置坐標,根據坐標位置,實現無軌導航[2]。
當機器人首次進入巡邏場所時,會利用3D激光雷達掃描周圍環境,并通過同步地圖構造和定位算法生成環境地圖。在執行巡檢任務中,精確匹配3D激光實時掃描地形和環境地形,以計算全球的位置信息,如圖1。在一些特殊情況下,3D激光雷達掃描的地形特征很容易受到干擾,例如,在地形特征稀疏的一些室外環境中。為了保證導航的準確性和可靠性,警用巡邏機器人采用慣性導航技術來修改3D激光雷達所匹配的地形,從而達到對全局環境的了解。通過測量其加速度和角速度以及單元融合編碼器的反饋信息,生成精確的軌跡遞歸運動模型,最后輸出機器人的速度和位置信息。為了保證機器人導航的可靠性,復雜。為了保證機器人導航的可靠性,避免3D激光受到干擾,導航系統引入了冗余傳感器數據交叉診斷技術來隔離干擾信號。三維激光導航的算法流程如下:讀取三維點云圖,慣性和里程數據 ; 光柵化,降噪和雜質處理;計算初始圖像位置;計算機器人姿勢推測;計算機器人姿態觀測值;計算機器人的最佳位置和方向。
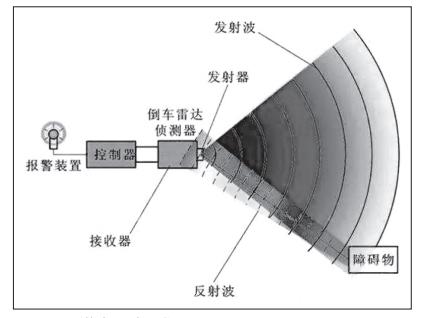
圖 1 3D激光雷達工作原理
3、3D激光雷達在警用巡邏機器人導航中的優勢
三維激光導航技術對外部環境的依賴性比較小,對定位有較高的精度,可以測量較長的距離,能處理大量的環境信息。當機器人的周圍環境變化不大的時候,它可以比較穩定,對全局信息的影響很小,從而減少了對環境中固定參考的依賴。3D激光導航的主要優點是:高信噪比(SNR):點云信息量是具有相同分辨率的2D激光器的16倍。位置和姿勢信息:對于惡劣的路況,可以獲得統一坐標系下的點云圖,并輸出準確的位置信息;定位精度高:大多數情況下,位置精度可達±2 cm,角度精度達到±1°,可避免障礙物避免:可以檢測前方立體區域,完全避免障礙物 并且可以防止跌落[3]。
4、巡邏機器人關鍵技術
移動機器人技術和安全監控功能是巡邏機器人的重要組成部分呢。移動系統,傳感器,控制器,報警器和通信設備是其一般的組成部分。移動機構可以做成步行形式、輪式、履帶式和混合式,它是巡邏機器人的主體,決定了巡邏機器人的運動空間和活動能力。傳感系統一般采用ccD攝像頭傳感系統,超聲波測距儀,激光測距儀,觸摸和接近傳感器,紅外傳感器等。近年來,由于通信技術,計算機技術,人工智能技術和傳感技術發展飛快,對巡邏機器人的研發也進入了飛速發展的時期,迎來了比較美好的發展前景。巡邏機器人的工作環境往往是不確定和隨時間變化的,所以必須考慮其安全性,可靠性和抗干擾性。因此,多傳感器信息融合技術被用于檢測環境,以增加信息的互補性和容錯性。目前關鍵技術有多傳感器信息融合技術,導航技術,智能控制等。下面對導航技術做具體的闡述。
巡邏機器人的導航是根據預先給出的安全任務,根據已知的地圖信息進行全局路徑規劃,并持續感知本地工作環境信息,并在旅行過程中自行做出各種決策。隨時調整姿勢和姿勢,避開障礙物,引導自己安全駕駛。同時,完成定時,定點或循環巡檢的安全工作。機器人的工作環境可分為靜態環境,動態已知環境和動態不確定環境。路徑規劃的研究內容可以根據機器人獲取環境信息的不同方式分為基于模型的路徑規劃和基于傳感器的路徑規劃。根據機器人了解環境信息的程度,可以將其分為全局路徑規劃和完全未知或部分未知的環境信息。可以通過傳感器在線檢測機器人的工作環境。用于獲取有關障礙物的位置,形狀和大小的信息的本地路徑規劃。隨著應用場景數量的增加和適用環境日益復雜,警用巡邏機器人的導航技術要求越來越高。現有的導航方法主要包括磁條,激光,GPS等,這些方法對環境的適應性和穩定性存在明顯的缺陷。3D激光導航技術可以有效彌補這些缺點,它較少依賴于固定參考對象,并且對周圍環境中的微小變化不敏感。因此,3D激光導航技術可以提高機器人環境的適應性和穩定性。
導航系統的關鍵是解決自定位,目標規劃和導航規劃。警用巡邏機器人的地圖創建和定位是其導航研究的基礎,也是實現“自治”的重要保證。全局路徑動態規劃是警用巡邏機器人導航中最重要的任務之一。警用巡邏機器人路徑規劃系統的主要要求是在環境地圖中找到一條路徑。確保警察巡邏機器人沿路徑移動時不會與外界發生碰撞 ; 它可以處理傳感器感知環境模型中的不確定因素和路徑執行中的誤差,并通過使警察巡邏機器人避開外部物體來最小化對機器人傳感器的感測范圍的影響。可以根據需要找到最佳路徑。常見的路徑尋找算法包括兩類:基于靜態數據的路由算法和基于實時數據的路由算法[4]。靜態數據路由算法是一種在歷史數據的基礎上,在地圖網絡環境不變的情況下,計算最優路徑的方法。靜態數據路由算法很簡單,但需要一次計算才能得到最優路徑。然而,該算法缺乏實時信息收集和反饋,因此不適合在復雜多變的環境中應用。
5、3D激光雷達在警用巡邏機器人導航中的應用
在重大節日期間,都會有警察巡邏機器人在人群密集及重要場所進行值班巡邏。起初普遍使用2D激光導航技術,但是由于2D激光導航技術對環境依賴性大,而這些場所一般面積較大,標記少,人員密集,所以導航效果差,經常出現失去問題的立場。3D激光導航技術主要用于解決這個問題,它借助垂直尺寸信息,大大提高了導航的穩定性和準確性。3D點云用于構建場景環境的地圖,它所導航呈現的地面,圍欄,安全棚,人群和樹木都清晰可見。機器人使用這些豐富的數據準確定位其在環境中的位置,從而可以獲得有關周圍環境的更多信息。當警察巡邏機器人的周圍環境略有變化時,對整體情況的影響顯著減小,從而減少了對環境中固定參考的依賴。減少了周圍環境變化引起的定位誤差,大大提高了導航的穩定性和準確性。





 粵公網安備44030602003691號
粵公網安備44030602003691號